重现步骤
v2.1.1
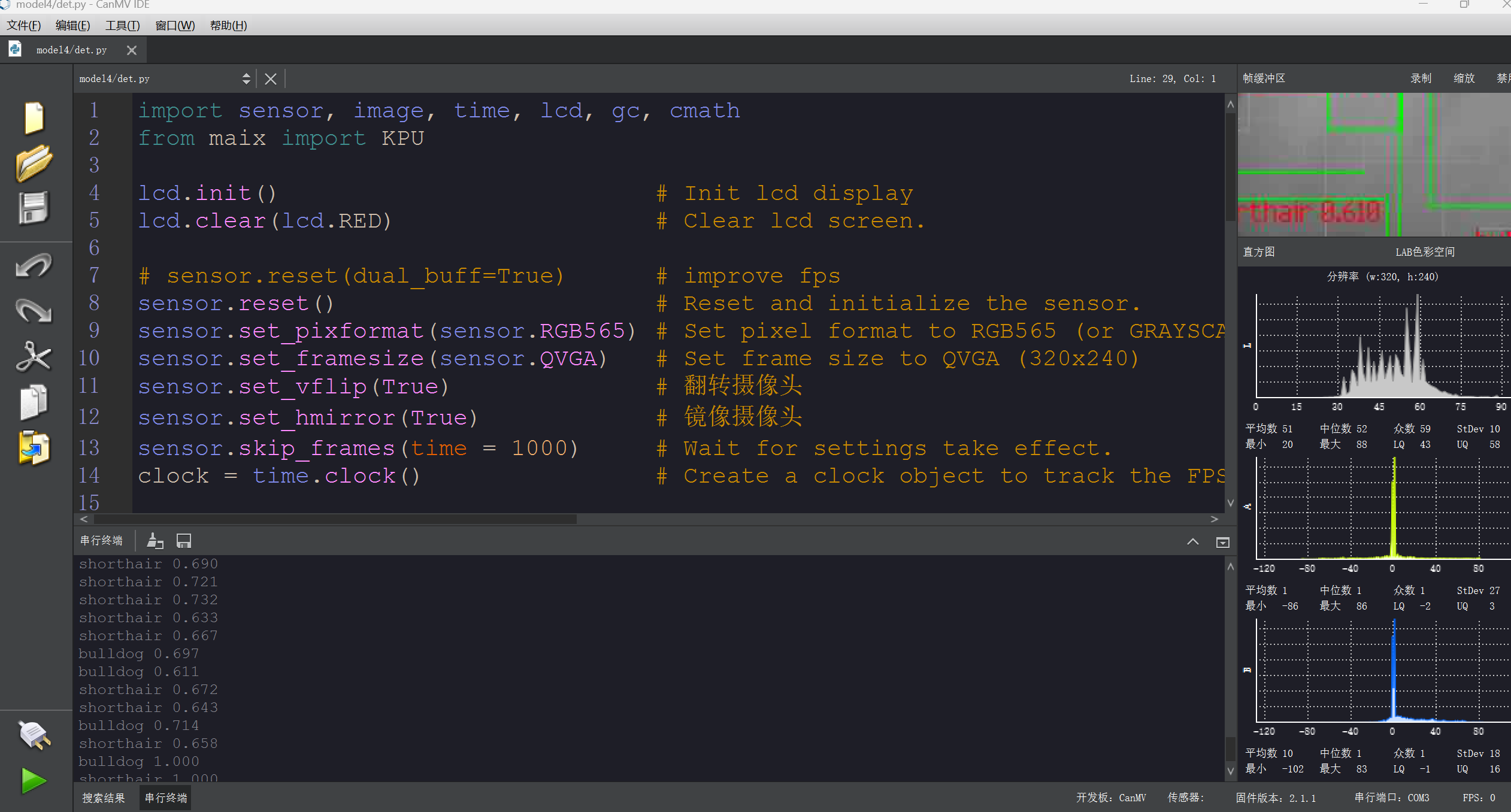
这是det_result

import sensor, image, time, lcd, gc, cmath
from maix import KPU
lcd.init() # Init lcd display
lcd.clear(lcd.RED) # Clear lcd screen.
# sensor.reset(dual_buff=True) # improve fps
sensor.reset() # Reset and initialize the sensor.
sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240)
sensor.set_vflip(True) # 翻转摄像头
sensor.set_hmirror(True) # 镜像摄像头
sensor.skip_frames(time = 1000) # Wait for settings take effect.
clock = time.clock() # Create a clock object to track the FPS.
print("ready load model")
labels = ["1", "2","3"]#类名称,按照label.txt顺序填写
anchor = (4.21, 4.65, 5.46, 5.51, 6.77, 5.18, 6.04, 6.34, 5.59, 7.12, 6.65, 6.65, 7.30, 6.24, 8.92, 5.83, 8.50, 7.04) # anchors,使用anchor.txt中第二行的值
kpu = KPU()
# 从sd或flash加载模型
kpu.load_kmodel('/sd/det.kmodel')
#kpu.load_kmodel(0x300000, 584744)
kpu.init_yolo2(anchor, anchor_num=(int)(len(anchor)/2), img_w=320, img_h=240, net_w=320 , net_h=240 ,layer_w=10 ,layer_h=8, threshold=0.6, nms_value=0.3, classes=len(labels))
while(True):
gc.collect()
clock.tick()
img = sensor.snapshot()
kpu.run_with_output(img)
dect = kpu.regionlayer_yolo2()
fps = clock.fps()
if len(dect) > 0:
for l in dect :
a = img.draw_rectangle(l[0],l[1],l[2],l[3],color=(0,255,0))
info = "%s %.3f" % (labels[l[4]], l[5])
a = img.draw_string(l[0],l[1],info,color=(255,0,0),scale=2.0)
print(info)
del info
a = img.draw_string(0, 0, "%2.1ffps" %(fps),color=(0,60,255),scale=2.0)
lcd.display(img)