Here are some additional test results:
Part of the testing was to create a minimal implementation of sample_vicap streaming two cameras, the code is here:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <errno.h>
#include <signal.h>
#include "k_module.h"
#include "k_type.h"
#include "k_vb_comm.h"
#include "k_vicap_comm.h"
#include "k_video_comm.h"
#include "k_sys_comm.h"
#include "mpi_vb_api.h"
#include "mpi_vicap_api.h"
#include "mpi_isp_api.h"
#include "mpi_sys_api.h"
#include "k_vo_comm.h"
#include "mpi_vo_api.h"
#include "k_connector_comm.h"
#include "mpi_connector_api.h"
#include "mpi_sensor_api.h"
#define VICAP_OUTPUT_BUF_NUM 5
#define VICAP_INPUT_BUF_NUM 3
#define NUM_CAMERAS 2
static volatile int keep_running = 1;
void int_handler(int dummy) { keep_running = 0; }
static void vb_exit() {
kd_mpi_vb_exit();
}
int main() {
signal(SIGINT, int_handler);
k_s32 ret = 0;
k_connector_type connector_type = LT9611_MIPI_4LAN_1920X1080_60FPS;
k_connector_info connector_info;
memset(&connector_info, 0, sizeof(connector_info));
ret = kd_mpi_get_connector_info(connector_type, &connector_info);
if (ret) { printf("Failed to get connector info\n"); return ret; }
k_s32 connector_fd = kd_mpi_connector_open(connector_info.connector_name);
if (connector_fd < 0) { printf("Failed to open connector\n"); return 1; }
kd_mpi_connector_power_set(connector_fd, 1);
kd_mpi_connector_init(connector_fd, connector_info);
// --- Camera/sensor setup ---
k_vicap_sensor_type sensor_types[NUM_CAMERAS] = {81, 82};
k_vicap_sensor_info sensor_infos[NUM_CAMERAS];
k_vicap_dev_attr dev_attrs[NUM_CAMERAS];
int dev_ids[NUM_CAMERAS] = {0, 1};
int chn_ids[NUM_CAMERAS] = {0, 0}; // always using channel 0 on each dev
memset(sensor_infos, 0, sizeof(sensor_infos));
memset(dev_attrs, 0, sizeof(dev_attrs));
for (int i = 0; i < NUM_CAMERAS; ++i) {
sensor_infos[i].sensor_type = sensor_types[i];
ret = kd_mpi_vicap_get_sensor_info(sensor_types[i], &sensor_infos[i]);
if (ret) { printf("Failed to get sensor info for sensor %d\n", sensor_types[i]); return ret; }
dev_attrs[i].input_type = VICAP_INPUT_TYPE_SENSOR;
dev_attrs[i].acq_win.h_start = 0;
dev_attrs[i].acq_win.v_start = 0;
dev_attrs[i].acq_win.width = sensor_infos[i].width;
dev_attrs[i].acq_win.height = sensor_infos[i].height;
dev_attrs[i].mode = VICAP_WORK_OFFLINE_MODE;
dev_attrs[i].buffer_num = VICAP_INPUT_BUF_NUM;
dev_attrs[i].buffer_size = VICAP_ALIGN_UP((sensor_infos[i].width * sensor_infos[i].height * 2), VICAP_ALIGN_1K);
// dev_attrs[i].pipe_ctrl.data = 0xFFFFFFFF;
dev_attrs[i].pipe_ctrl.data = 0x00000000;
dev_attrs[i].pipe_ctrl.bits.ae_enable = 0;
dev_attrs[i].pipe_ctrl.bits.awb_enable = 0;
dev_attrs[i].pipe_ctrl.bits.dnr3_enable = 0;
dev_attrs[i].pipe_ctrl.bits.ahdr_enable = 0;
dev_attrs[i].cpature_frame = 0;
dev_attrs[i].dw_enable = 0;
dev_attrs[i].mirror = VICAP_MIRROR_NONE;
memcpy(&dev_attrs[i].sensor_info, &sensor_infos[i], sizeof(sensor_infos[i]));
ret = kd_mpi_vicap_set_dev_attr(dev_ids[i], dev_attrs[i]);
if (ret) { printf("Failed to set dev attr for dev %d\n", dev_ids[i]); return ret; }
}
// --- Video Buffer setup ---
k_vb_config vb_config;
memset(&vb_config, 0, sizeof(vb_config));
vb_config.max_pool_cnt = NUM_CAMERAS * 2;
for (int i = 0; i < NUM_CAMERAS; ++i) {
// Input pool (for RAW)
vb_config.comm_pool[i * NUM_CAMERAS].blk_cnt = VICAP_INPUT_BUF_NUM;
vb_config.comm_pool[i * NUM_CAMERAS].mode = VB_REMAP_MODE_NOCACHE;
vb_config.comm_pool[i * NUM_CAMERAS].blk_size = dev_attrs[i].buffer_size;
// Output pool (for YUV)
vb_config.comm_pool[i * NUM_CAMERAS + 1].blk_cnt = VICAP_OUTPUT_BUF_NUM;
vb_config.comm_pool[i * NUM_CAMERAS + 1].mode = VB_REMAP_MODE_NOCACHE;
vb_config.comm_pool[i * NUM_CAMERAS + 1].blk_size = VICAP_ALIGN_UP((sensor_infos[i].width * sensor_infos[i].height * 3 / 2), VICAP_ALIGN_1K);
}
ret = kd_mpi_vb_set_config(&vb_config);
if (ret) { printf("Failed to set vb config\n"); return ret; }
k_vb_supplement_config supplement_config;
memset(&supplement_config, 0, sizeof(supplement_config));
supplement_config.supplement_config |= VB_SUPPLEMENT_JPEG_MASK;
ret = kd_mpi_vb_set_supplement_config(&supplement_config);
if (ret) { printf("Failed to set vb supplement config\n"); return ret; }
ret = kd_mpi_vb_init();
if (ret) { printf("Failed to init vb\n"); return ret; }
atexit(vb_exit);
// --- VICAP channel attribute setup and binding ---
k_vicap_chn_attr chn_attrs[NUM_CAMERAS];
k_mpp_chn vicap_mpp_chn[NUM_CAMERAS], vo_mpp_chn[NUM_CAMERAS];
k_vo_layer vo_layers[NUM_CAMERAS] = { K_VO_LAYER1, K_VO_LAYER2 };
int vo_chn_ids[NUM_CAMERAS] = { K_VO_DISPLAY_CHN_ID1, K_VO_DISPLAY_CHN_ID2 };
for (int i = 0; i < NUM_CAMERAS; ++i) {
kd_mpi_vicap_set_dump_reserved(dev_ids[i], chn_ids[i], K_TRUE);
memset(&chn_attrs[i], 0, sizeof(chn_attrs[i]));
chn_attrs[i].out_win.width = sensor_infos[i].width;
chn_attrs[i].out_win.height = sensor_infos[i].height;
chn_attrs[i].crop_win.width = sensor_infos[i].width;
chn_attrs[i].crop_win.height = sensor_infos[i].height;
chn_attrs[i].scale_win = chn_attrs[i].out_win;
chn_attrs[i].crop_enable = K_FALSE;
chn_attrs[i].scale_enable = K_FALSE;
chn_attrs[i].chn_enable = K_TRUE;
chn_attrs[i].pix_format = PIXEL_FORMAT_YUV_SEMIPLANAR_420;
chn_attrs[i].buffer_num = VICAP_OUTPUT_BUF_NUM;
chn_attrs[i].buffer_size = vb_config.comm_pool[i * NUM_CAMERAS + 1].blk_size;
chn_attrs[i].fps = 0;
ret = kd_mpi_vicap_set_chn_attr(dev_ids[i], chn_ids[i], chn_attrs[i]);
if (ret) { printf("Failed to set chn attr for dev %d\n", dev_ids[i]); return ret; }
vicap_mpp_chn[i].mod_id = K_ID_VI;
vicap_mpp_chn[i].dev_id = dev_ids[i];
vicap_mpp_chn[i].chn_id = chn_ids[i];
vo_mpp_chn[i].mod_id = K_ID_VO;
vo_mpp_chn[i].dev_id = K_VO_DISPLAY_DEV_ID;
vo_mpp_chn[i].chn_id = vo_chn_ids[i];
ret = kd_mpi_sys_bind(&vicap_mpp_chn[i], &vo_mpp_chn[i]);
if (ret) { printf("Failed to bind sys for dev %d\n", dev_ids[i]); return ret; }
}
// --- VO layer setup ---
for (int i = 0; i < NUM_CAMERAS; ++i) {
k_vo_video_layer_attr layer_attr;
memset(&layer_attr, 0, sizeof(layer_attr));
layer_attr.display_rect.x = i * 400;
layer_attr.display_rect.y = 0;
layer_attr.img_size.width = sensor_infos[i].width;
layer_attr.img_size.height = sensor_infos[i].height;
layer_attr.pixel_format = PIXEL_FORMAT_YVU_PLANAR_420;
layer_attr.stride = (layer_attr.img_size.width / 8 - 1) + ((layer_attr.img_size.height - 1) << 16);
layer_attr.func = K_ROTATION_0;
ret = kd_mpi_vo_set_video_layer_attr(vo_layers[i], &layer_attr);
if (ret) { printf("Failed to set vo layer attr %d\n", vo_layers[i]); return ret; }
ret = kd_mpi_vo_enable_video_layer(vo_layers[i]);
if (ret) { printf("Failed to enable vo layer %d\n", vo_layers[i]); return ret; }
}
ret = kd_mpi_vo_enable();
if (ret) { printf("Failed to enable vo\n"); return ret; }
// --- Start streaming for both cameras ---
for (int i = 0; i < NUM_CAMERAS; ++i) {
ret = kd_mpi_vicap_init(dev_ids[i]);
if (ret) { printf("Failed to vicap init for dev %d\n", dev_ids[i]); return ret; }
}
for (int i = 0; i < NUM_CAMERAS; ++i) {
ret = kd_mpi_vicap_start_stream(dev_ids[i]);
if (ret) { printf("Failed to start stream for dev %d\n", dev_ids[i]); return ret; }
}
printf("Streaming 2 cameras. Press Ctrl-C to quit.\n");
while (keep_running) {
sleep(1);
}
// --- Cleanup ---
for (int i = 0; i < NUM_CAMERAS; ++i) {
kd_mpi_vicap_stop_stream(dev_ids[i]);
kd_mpi_vicap_deinit(dev_ids[i]);
kd_mpi_vo_disable_video_layer(vo_layers[i]);
kd_mpi_sys_unbind(&vicap_mpp_chn[i], &vo_mpp_chn[i]);
}
return 0;
}
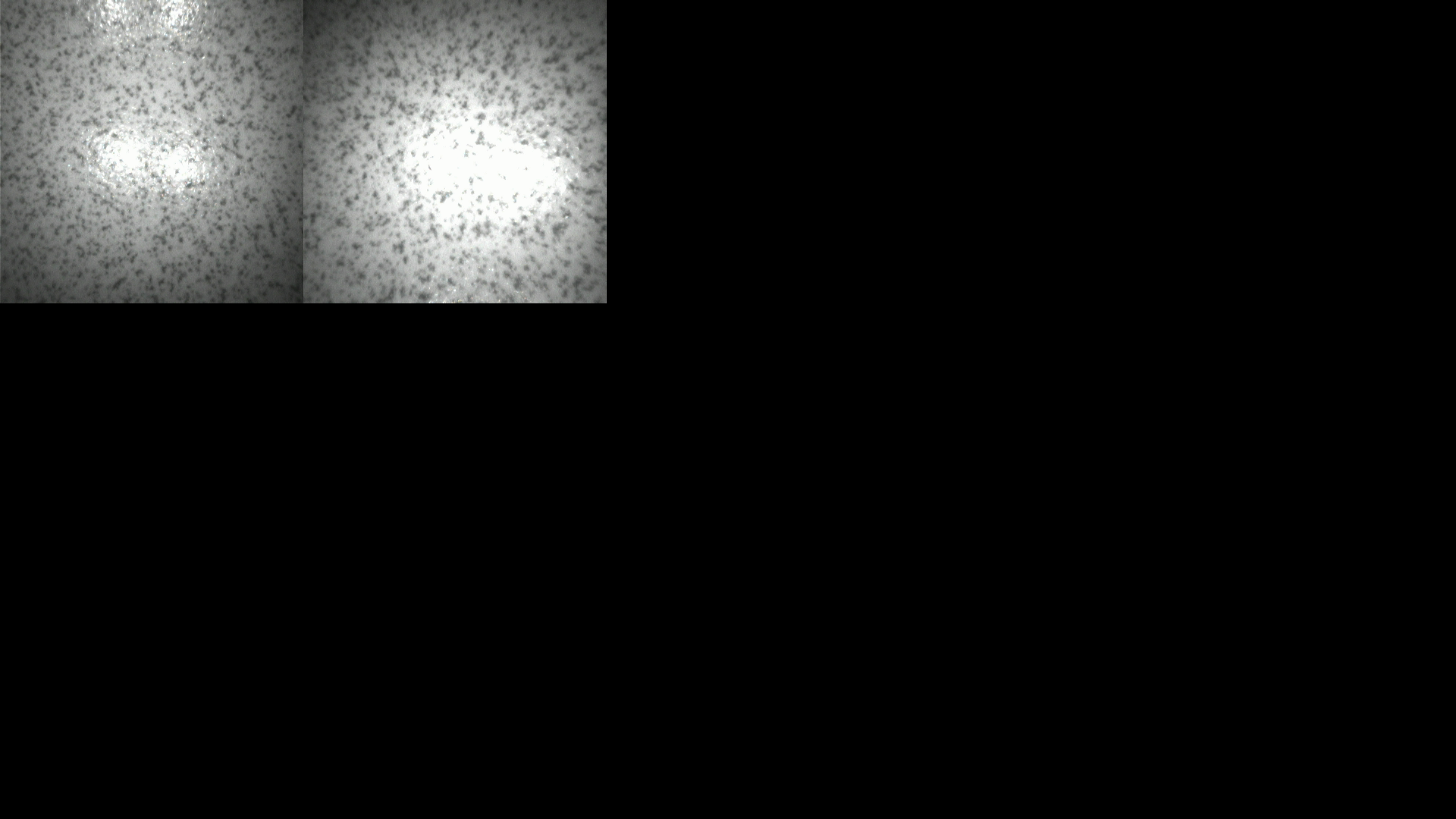
The cameras are configured for 400x400@120fps 10-bit raw mode, and the first time I run the program after power cycle I see the following result:
If I exit and run the program agian, I usually get two good frames, but they are still frozen: